Showing 17–32 of 149 results
-

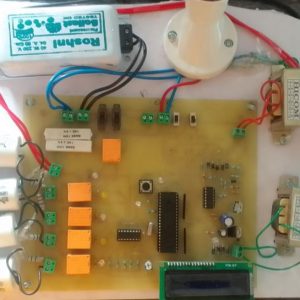
Automatic Load Sharing By Parallel Transformer
₹7,500.00₹6,200.00Transformer is basically a static device which transfers the electrical power from one circuit to another circuit with desired change in voltage and current at constant frequency. It is only one device which operates at highest efficiency at full load condition. But abnormal condition occurs at overloading condition which may result in severe problem in future.
-
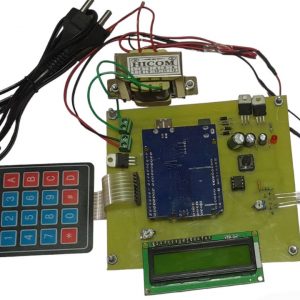
AUTOMATIC POWER FACTOR CORRECTION USING PIC- MICROCONTROLLER
₹8,400.00₹7,500.00In this proposed system, two zero crossing detectors are used for detecting zero crossing of voltage and current. The project is designed to minimize penalty for industrial units using automatic power factor correction unit. The PIC microcontroller used in this project .
The time lag between the zero-voltage pulse and zero-current pulse is duly generated by suitable operational amplifier circuits in comparator mode is fed to two interrupt pins of a microcontroller. The program takes over to actuate appropriate number of relays from its output to bring shunt capacitors into load circuit to get the power factor till it reaches near unity.
-

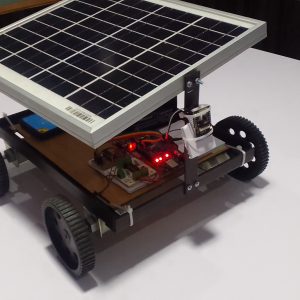
AUTOMATIC SOLAR PANEL CLEANING ROBOT USING ARDUINO
₹14,800.00₹13,800.00The Solar energy is the most abundant source of energy for all the forms of Life on the planet Earth. Solar is the basic source of renewable energy. One can generally assume a reduction of about 40% – 55%, if the panels are not clean properly for 1-2 months.
-

Automatic Solar Pannel Cleaning By Sensing Solar Voltage And Light Luminance
₹11,000.00₹9,400.00The solar PV modules are generally employed in dusty environments. The dust gets accumulated on the front surface of the module and blocks the incident light from the sun. It reduces the power generation capacity of the module. The power output reduces as much as by 50% if the module is not cleaned for a month.
-


Automatic Street Light Intensity Control Based On The IR Sensor Using Arduino
₹9,000.00₹7,800.00Nowadays the amount of power consumed by lighting and streets shares a major energy demand. The vehicles are passing over always and a part of places will be consisting of less dense areas and even no vehicle moments itself in few areas. But during the night all street lights will be on in a conventional street lighting system. To overcome this issue, proper energy-saving methods and lighting control are to be implemented.
-

Autonomous Fire Fighting Robot Using Arduino
₹15,500.00₹14,000.00A fire outbreak is a hazardous activity that leads to numerous consequences. Detecting a fire at an early stage and extinguishing it can aid in the prevention of various accidents. Till now we rely on human resources. This often leads to risking the life of that person. Therefore, fire security becomes an important aspect to save human lives. In this, a fire extinguishing robot has been proposed and designed which detects the fire location and extinguishes the fire by using sprinklers on triggering the pump. This robot uses flame sensors for accurate fire detection. This proposed model of Fire Extinguishing Robot using Arduino is used to detect the presence of fire and extinguish it automatically without any human interference. It contains gear motors and motor drivers to control the movement of the robot when it detects any presence of fire and will automatically start the water pump to extinguish that fire breakout. This model robot has a water ejector which is capable of ejecting water at the fire breakout place. The water ejector pipe can be moved in the required direction using a servo motor. The whole operation is controlled by an Arduino UNO.
Fire-fighting is an important but dangerous occupation. A firefighter must be able to reach the situation quickly and safely extinguish the fire, preventing further damage and reducing fatalities. Technology has come to rescue this issue, fire-fighters and machines are now having more efficient and effective methods of fire fighting. This gives you the design idea of a fire-fighting robot using autonomous operation. The robotic vehicle is loaded with a fire extinguisher and a water pump which is controlled over the solenoid valve to throw water. An Arduino UNO is used for the desired operation. A water tank and fire extinguisher set up along with a water pump are mounted on the robot body and its operation is carried out from the output through the appropriate signal from the sensor. The whole operation is controlled by an Arduino UNO.
-
BLDC MOTOR SPEED CONTROL WITH RPM COUNT
₹8,600.00₹7,600.00In this Project, the objective is to cont control of the machineries which involving this motor can be done accurately, thus making the industrial automation production rate increased.
In the prevailing case Brushless Direct Current motor are extensively used in some of the industries because of its low cost, noise less operation, high speed torque characteristics, Speed controlling is very essential.
-
Camera Surveillance Robot Using DTMF Technology
₹13,200.00₹12,500.00The “DTMF-based robot” is controlled by a mobile phone that makes a call to another mobile phone attached to the robot. In the course of a call, if any button is pressed, a tone corresponding to the button pressed is heard at the other end of the call.
This tone is called “Dual Tone Multiple-Frequency” (DTMF) tone. The robot perceives this DTMF tone with the help of the phone stacked on the robot. The received tone is processed by the ARDUINO with the help of an IC. The ARDUINO then transmits the signal to the motor driver ICs to operate the motors. Since this robot is controlled by dialing a call so we can also call it a DTMF-controlled robot.
The transmitter section consists of another phone with a smartphone through an app called..Using a mobile phone we can generate DTMF tones which will be received by another mobile phone mounted on a robot after call connection.
The mobile phone on the robot is connected to the Arduino controller and the output or Arduino is connected to the motor driver which helps the robot to move wirelessly.
As we are using the internet the robot can be operated from any part of the world so, we need to see where the robot is moving, for which we are using the Airdroid app for monitoring through a camera inbuilt into the smartphone mounted on the robot.
-


Chemical Mixture Using Arduino
₹17,000.00₹16,000.00The main aim of the project is to process the real time acquisition under arduino for large scale remote industrial environment.
In large industrial establishments many processes go on, therefore it is essential to monitor all the processes and control the factors affecting them. Adapting a technology like Arduino (Arduino controller) one can achieve the above mentioned objective effectively
-
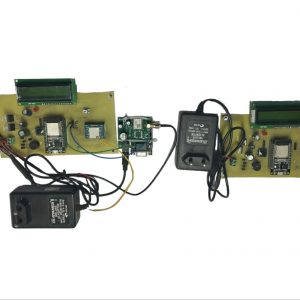
Child / Women Safety Using ESP32 And GPS over Lora Communication
₹12,000.00₹10,800.00Women security / child security is fundamental now-a-days. In India, there are numerous instances of Women badgering and attack expanding day by day. Wellbeing of Womenmatters let be whether at home, open air or it be their work place
-

Crane Swing Control Over IOT
₹15,400.00₹14,000.00Crane operation is one of the most essential activities on construction sites. However, operating a crane is a sophisticated job that requires the operator to have extensive skills and experience, and most importantly a comprehensive understanding of crane motions.
Besides typical crane motions such as boom slew, hoist, and extension, monitoring and controlling the position of the load is extremely important to avoid struck-by accidents caused by crane load, especially when the load swings as a result of wind and inertia.
Although typical motions can be captured by some existing techniques, a reliable approach to position the load and monitor the load sway remains missing.
This study proposes an orientation-based approach for tracking crane load position and monitoring load sway in daily lifting activities. This approach adopts an omeasuring load orientation, and an efficient algorithm for converting orientation measurements to load positions.
The proposed approach was tested in two load sway scenarios in a controlled lab environment. Test results indicate that the proposed approach correctly converted orientation measurements to accurate load positions and reconstructed the load sway trajectory in both linear and circular sway motions. Enabling continuously monitoring of crane load motion,