




Description
The “DTMF-based robot” is controlled by a mobile phone that makes a call to another mobile phone attached to the robot. In the course of a call, if any button is pressed, a tone corresponding to the button pressed is heard at the other end of the call.
This tone is called “Dual Tone Multiple-Frequency” (DTMF) tone. The robot perceives this DTMF tone with the help of the phone stacked on the robot. The received tone is processed by the ARDUINO with the help of an IC. The ARDUINO then transmits the signal to the motor driver ICs to operate the motors. Since this robot is controlled by dialing a call so we can also call it a DTMF-controlled robot.
The transmitter section consists of another phone with a smartphone through an app called..Using a mobile phone we can generate DTMF tones which will be received by another mobile phone mounted on a robot after call connection.
The mobile phone on a robot is connected to the Arduino controller and the output or Arduino is connected to the motor driver which helps the robot to move wirelessly.
As we are using the internet the robot can be operated from any part of the world so, we need to see where the robot is moving, for which we are using the Airdroid app for monitoring through a camera inbuilt into the smartphone mounted on the robot.
HIGHLIGHTS
- All in all the aim is to drive a robot remotely by using a mobile phone from anywhere.
- The project of a DTMF-based control robot using Arduino.
- In the project, the robot is used to control the instruction of the user.
- The objective of designing this robot is simply to facilitate the human in the future for security purposes.
BLOCK DIAGRAM
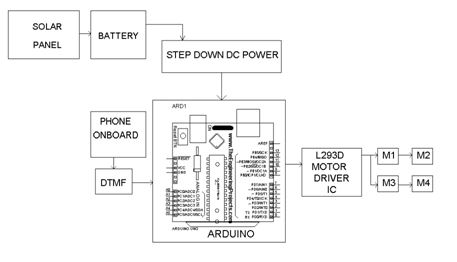
HARDWARE REQUIREMENTS
- ARDUINO
- DC TRANSFORMER
- L293D MOTOR DRIVER IC
- DC MOTOR
- ANDROID PHONE
- SOLAR PANEL
- BATTERY
SOFTWARE REQUIREMENTS
- ARDUINO ID
- PROTIOUS

Sanika rathod –
Good
Vikash barnwal –
Good
Rupesh mohite –
very good
Prashant Jacob –
The project was great and it’s worth every penny…