




Description
Smart floor cleaning robot is a compact robotics system which provides floor cleaning services in room,big offices reducing human labor .Robot can achieve the function of intelligent obstacle avoidance, automatic sweeping and mopping. The aim of this project work is to develop and modernized process for cleaning the floor with wet and dry. This smart floor cleaning robot work in any of two modes i.e.” Automatic and Semi-automatic”. This robot can perform sweeping and mopping operation. All hardware and software operations are controlled by Arduino ATmega328 microcontroller. Bluetooth module have been used for wireless communication between android mobile(semi-automatic) and robot having range 100m
Note-
FLOOR CLEANING ROBOT WITH OBSTACLE DETECTION AND AUTO SET DIRECTIONis the project of last year’s engineering projects, BE final year engineering project. This project is used for the BE last year’s Electronics, electrical and Tele. Communication department students. This project is a Electronics project. This project is electronics and Tele. Communication department students. This project is mini project.
FLOOR CLEANING ROBOT WITH OBSTACLE DETECTION AND AUTO SET DIRECTIONis the project of a good price for the engineering projects. It is a very comparative engineering project. It is a very good BE final year project. It is a project for Arduino based project. This project is sensor based project as well as GSM based project .
The engineering projects give in the ELECTROSAL HI- TECH PVT.LTD. The best place for the degree final year engineering projects as well as for Electronics ,electrical and electronics and Tele. Communication students’ final year for the golden opportunity.
FLOOR CLEANING ROBOT WITH OBSTACLE DETECTION AND AUTO SET DIRECTION is an easy project and idea for the electronics ,electrical and Tele . Communication base students and 100% output is done.
HIGHLIGHTS
- Developing Bluetooth controlled mobile robot.
- To scan the obstacles earlier than the robot and to avoid collision when the robot is in motion.
- To test the trail status using IR sensor.
- To create a robot this carries out sweeping operation efficiently.
To try to moping operation whenever needed along with sweeping
BLOCK DIAGRAM
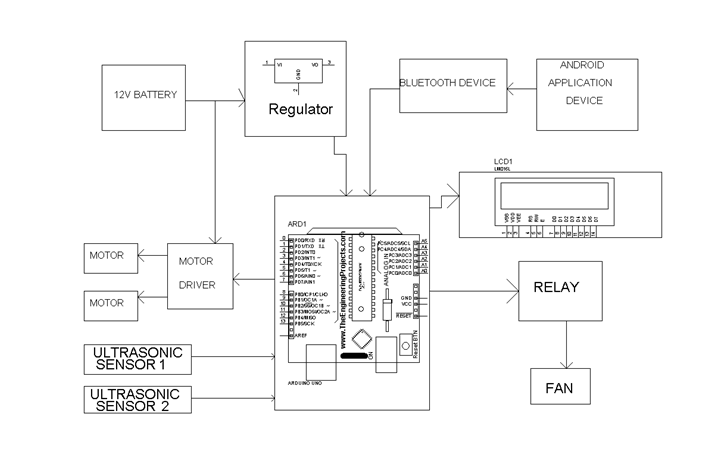
HARDWARE REQUIREMENTS
- ARDUINO UNO
- Bluetooth
- Motor driver ic
- DC Motor
- Wheel
- `12 Battery
- Lcd display
- Relay
- Relay driver ic
- Fan
- Ultrasonic sensor
SOFTWARE REQUIREMENTS
- Eagle
- Keil
- Proteus

Reviews
There are no reviews yet.