




Description
In recent years the industry and daily routine works are found to be more attracted and implemented through automation via Robots. The pick and place robot is one of the technologies in manufacturing industries which is designed to perform pick and place operations. The system is so designed that it eliminates the human error and human intervention to get more precise work. There are many fields in which human intervention is difficult but the process under consideration has to be operated and controlled this leads to the area in which robots find their applications. Literature suggests that the pick and place robots are designed, implemented in various fields such as; in bottle filling industry, packing industry, used in surveillance to detect and destroy the bombs etc. The project deals with implementing anpick and place robot using Robot Arduino for any pick and place functions. The pick and place robot so implemented is controlled using RF signal. The chassis is supported for the displacement of robotic arm by four Omni wheels. The robotic arm implemented has two degrees of freedom. Many other features such as line follower, wall hugger, obstacle avoider, metal detector etc can be added to this robot for versatility of usage. ESP32 camera is used to capure the image of object that’s why robot easily detect and place object .
Note-
PICK AND PLACE ROBOT USING ROBOTIC ARM ESP32 CAMERA ARDUINO AND BLUETOOTH is the project of last year’s engineering projects, BE final year engineering project. This project is used for the BE last year’s Electronics, electrical and Tele. Communication department students. This project is a Electronics project. This project is electronics and Tele. Communication department students. This project is mini project.
PICK AND PLACE ROBOT USING ROBOTIC ARM ESP32 CAMERA ARDUINO AND BLUETOOTHis the project of a good price for the engineering projects. It is a very comparative engineering project. It is a very good BE final year project. It is a project for Arduino based project. This project is sensor based project as well as bluetooth based project .
The engineering projects give in the ELECTROSAL HI- TECH PVT.LTD. The best place for the degree final year engineering projects as well as for Electronics ,electrical, mechanical and electronics and Tele. Communication students’ final year for the golden opportunity.
PICK AND PLACE ROBOT USING ROBOTIC ARM ESP32 CAMERA ARDUINO AND BLUETOOTHis an easy project and idea for the electronics ,Mechanical ,electrical and Tele . Communication base students and 100% output is done.
HIGHLIGHTS
The main objectives of this project are
Ø To control the displacement of the robotic arm so that the arm can be used to pick and place the elements from any source to destination.
Ø To control the displacement and movement of robotic arm using RF Transmitter and Receiver.
Ø To implement a robotic arm with two degrees of freedom.
BLOCK DIAGRAM
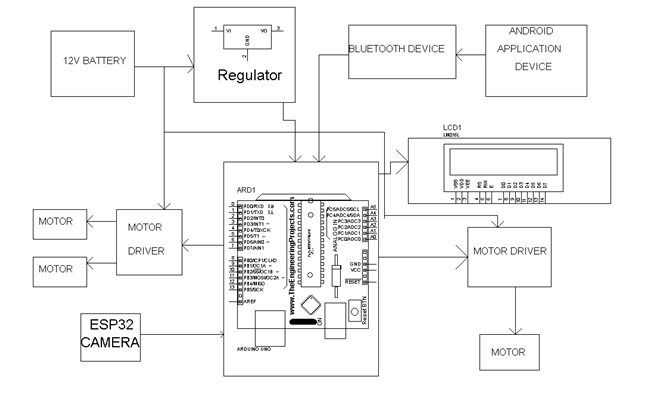
HARDWARE REQUIREMENTS
- ARDUINO UNO
- Bluetooth
- Motor driver ic
- DC Motor
- Wheel
- `12 Battery
- Lcd display
- ESP32 CAMERA
SOFTWARE REQUIREMENTS
- Eagle
- Arduino uno
- Proteus

Akshara Gupte –
Online customer support by the electrosal support team is quite promising. They attended me and solved my doubt each time I made a video call.
Phoolan Mullah –
My kit delivery was a day late but no problems since my submissions were late, well I surely learned a lot from this kit it has very detailed explanation documents and videos. Overall a nice experience.
Mahesh Patil –
We the faculty and students of E & Tc Engg. from Vidyavardhini Institute of Technology , Pal visited this company. The company is working on core electronics with highest quality products and industries services. The best thing is that company provides technical solutions for rural area students , Educational institutions and near by rural area ( Village , Hospital etc) as a social work without any commercial interest. Greatly appreciated ….??