



Description
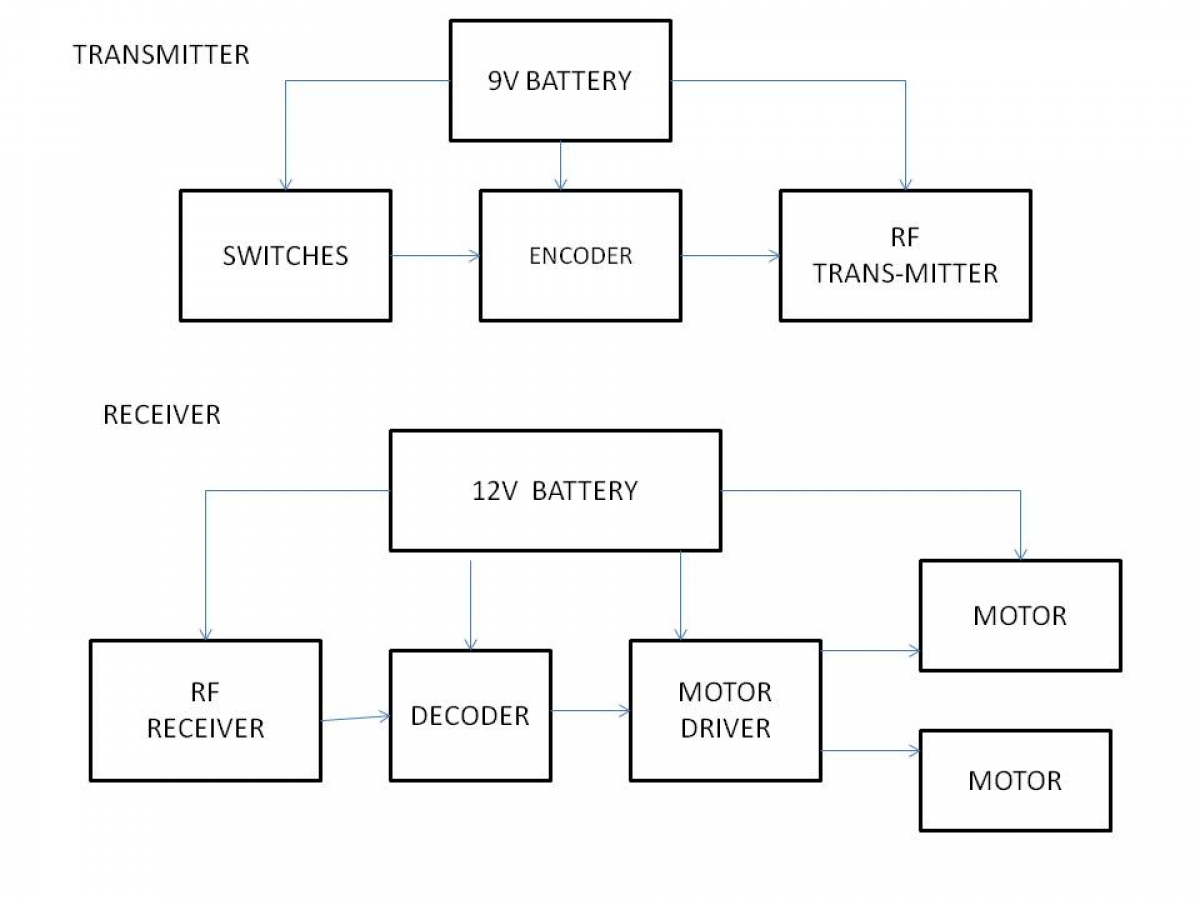
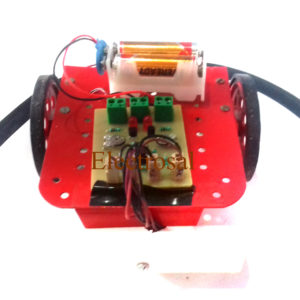
The project is designed to control the ROBOT by using a RF technology for remote operation using an transmitter and receiver. The speed of the DC motor is directly proportional to the voltage applied across its terminals. Hence, if the voltage across motor terminal is varied, then the speed can also be varied.
This project uses the above principle to control the speed of the motor by varying the duty cycle of the pulse applied to it (popularly known as PWM control). At the transmitting end using push buttons, commands are sent to the receiver to control the movement of the robot and make it move forward / backward and besides. An RF transmitter acts as a remote control that has the advantage of adequate range (up to 200 meters) with proper antenna. The receiver decodes the commands before feeding it to another DC motor via motor driver IC for necessary work. The average voltage given or the average current flowing through the motor will change depending on the duty cycle (ON and OFF time of the pulses), so the speed of the motor will change accordingly. The motor driver IC is interfaced to the decoder ic for receiving PWM signals and delivering desired output for speed control of the DC motor.
Furthermore, the project can be enhanced by using power electronic devices such as IGBTs to achieve speed control higher capacity industrial motors.
HIGHLIGHTS
- Designed to control RF robot
- RF technology for transmitter and receiver
- Encoder for transmitter and Decoder for Receiver
- Switches are used to control the direction
BLOCK DIAGRAM
HARDWARE REQUIREMENTS
- RF Receiver
- RF Transmitter
- Encoder IC
- Decoder IC
- 9v battery
- 12v battery
- L293D ic
- Motor
- Wheel
SOFTWARE REQUIREMENTS
- eagle
- protious


Rutuja masti –
good
Sudhir suryavanshi –
nice
Jyothi Gollanandala –
Project got in time. Good service after delivery by video call. They giving one year warranty with peace to peace replacement. I really like service of ELECTROSAL. Thanks team and specially thanks Tulasidas sir and poonam madam who supported me lot in my project ” Automatic Power factor Correction “